
GLOBAL POSITIONING
SYSTEM
Global Positioning System adalah
sebuah system yang terdiri dari 27 buah satelit, 24 buah beroperasi dengan 3
buah satelit sebagai cadangan. Sistem ini semula dikembangkan untuk keperluan
navigasi militer oleh pihak militer Amerika Serikat, tetapi kemudian bisa
dipergunakan oleh pihak-pihak bukan militer. Gambar 1 menlukiskan konstelasi
animatif satelit-satelit GPS.

Satelit dengan berat 3000 – 4000
pound ini mengorbit bumi pada ketinggian 12.000 mile atau 19.300 km melakukan
dua kali orbit penuh setiap hari.
Orbitnya diatur sedemikian sehingga, dipandang dari manapun di setiap tempat di
bumi ini selalu ada paling tidak 4 satelit yang nampak dari tempat tersebut.
Selain satelit di bumi harus ada
reciever yang bertugas melacak posisi empat satelit atau lebih, menentukan
jarak satelit ke bumi dan menggunakan informasi ini untuk menyimpulkan
posisinya sendiri di bumi. Operasi yang demikian ini berdasarkan atas prinsip
matematik yang disebut trilateration. Trilateration pada ruang tiga dimensi yang
agak rumit dapat didekati dengan pengertian trilateration dua dimensi yang
lebih sederhana.
Trilaterasi dua dimensi.
Bayangkan anda tersesat di suatu
tempat di Amerika Serikat dan anda tidak tahu sama sekali dimana anda berada.

Anda bertanya pada seseorang :”
Dimana saya sekarang?”. Ia menjawab : ”Anda ada di suatu tempat, 625 mile dari
Boise”. Ini jawaban bagus, tetapi susah untuk dipergunakan bila data ini
sendirian. Anda dapat berada dimana saja dalam sebuah lingkatan
dengan radius 625 mile dari Boise seperti nampak pada Gambar 2.

Kemudian anda bertanya pada orang
lain dan ia menjawab :”Anda berada 690 mile dari Minnesota”. Dengan jawaban ini
anda mulai dapat memperkirakan dimana anda berada. Bila anda menggabungkan
kedua informasi ini anda akan mendapatkan dua buah lingkaran yang berpotongan
seperti pada Gambar 3.
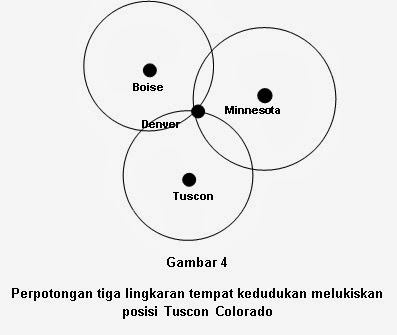
Apabila orang ketiga yang anda tanya
memberikan informasi, misalnya ia berkata bahwa anda berada 675 mile dari Tuscon,
Colorado, anda memperoleh tiga buah lingkaran yang merupakan tempat kedudukan
posisi anda. Ketga libkaran ini akan berpotongan pada satu titik seperti pada
Gambar 4. Setelah anda padukan informasi ini dengan peta Amerika Serikat anda
akan tahu bahwa berada di Denver, Colorado.
Konsep diatas berlaku juga untuk
konsep trilaterasi tiga dimensi, hanya saja dalam hal ini kita berkaitan dengan
konsep bola, bukan lingkaran.
Trilaterasi tiga dimensi.
Pada dasarnya trilaterasi tiga
dimensi tidak jauh berbeda dengan trilaterasi dua dimensi seperti yang
diuraikan diatas. Bayangkan bahwa radius lingkaran tersebut menuju ke semua
arah dalam tiga dimensi, maka dalam hal ini kita berhadapan dengan tiga buah
bola, bukan tiga buah lingkaran. Apabila anda berada 10 mile dari satelit A,
anda dapat berada dimana saja pada permukaan sebuah bola dengan diameter 10
mile. Bila anda juga tahu anda berada 15 mile dari satelit B, anda juga dapat
membayangkan anda berada pada permukaan bola lain dengan diameter 15 mile. Kedua
bola ini akan saling berpotongan pada sebuah lingkaran. Bila anda tahu jarak
anda dari satelit C, maka bidang bola ini akan dipotong oleh lingkaran tersebut
diatas pada dua titik.
Bumi tempat kita tinggal, juga
sebuah bola yang lain lagi. Dari kedua titik dalam lingkaran tadi hanya salah
satu yang berada pada permukaan bumi kita ini. Dengan demikian anda dapat tahu
satu-satunya titik, yaitu yang ada di permukaan bumi dari berbagai keboleh
jadian dalam bidang bola, dieliminir dalam bidang lingkaran, dieliminir lagi
menjadi dua titik dan terakhir dieliminir menjadi hanya satu titik saja.
GPS reciever biasanya mempergunakan
empat satelit atau lebih untuk melaporkan posisinya sehingga dapat diperoleh
koordinat reciever secara lebih tepat, termasuk informasi ketinggian lokasi. Untuk
mendapatkan perhitungan koordinat lokasi yang akurat, GPS reciever harus
mempunyai dua hal berikut ini :
- Lokasi satelit diatas reciever
- Jarak reciever ke satelit-satelit tersebut
GPS reciever memperoleh kedua besaran ini dengan menganalisis
sinyal radio (fekuensi tinggi, power rendah) dari satelit-satelit GPS. Akan
lebih baik apabila GPS reciever unit mempunyai beberapa reciever di dalamya,
sehingga unit ini dapat menangkap sinyal dari beberpa satelit sekaligus.
Gelombang radio adalah sebuah
gelombang elektromagnetik yang memiliki kecepatan sama dengan kecepatan cahaya,
sekitar 185.000 mile perdetik, atau 300.000 km per detik, pada ruang yang
vakum. Reciever dapat menetapkan berapa jauh sinyal satelit telah berjalan
dengan menghitung berapa lama waktu yang diperlukan sinyal tersebut untuk
sampai di reciever. Pada bab berikut, kita akan melihat bagaimana reciever dan
satelit bekerja sama untuk melakukan pengukuran ini.
PERHITUNGAN GPS
Pada uraian sebelumnya, kita TELAH membahas,
bahwa reciever GPS menghitung jarak dari reciever ke satelit dengan menghitung
waktu yang diperlukan oleh sinyal berjalan dari satelit ke reciever. Karena
waktu berjalan terus, berikut adalah elaborasi perhitungan ini.
Andaikan satelit mulai memancarkan
sinyal digital pattern panjang yang disebut pseudo random code signal pada satu
waktu awal, sebut waktu t0.
Tepat pada saat yang sama reciever juga memancarkan sinyal digital dengan
pattern yang sama. Pada waktu sinyal dari satelit sampai di reciever, sinyalnya
akan tsampai di reciever sedikit dibelakang sinyal yang dipancarkan oleh
reciever ( sama dengan t0
+ delay tine).
Besarnya delay time ini sama dengan
waktu perjalanan sinyal dari satelit ke reciever. Reciever akan mengalikan
delay time ini dengan kecepatan cahaya untuk mendapatkan jarak tempuh dari
sinyal ini. Dengan mengandaikan sinyal berjalan dalam garis lurus, jarak tempuh
ini adalah jarak dari satelit ke reciever. (Ingat s = v x t, dimana s = jarak
satelit ke reciever, v = kecepatan cahaya, t = delay time)
Untuk membuat perhitungan ini,
satelit dan reciever harus memiliki clock yang dapat disinkronkan sampai orde
nano second. Supaya satelit dan reciever dapat bekerja secara sinkron,
diperlukan ”jam atom”, baik pada satelit maupun pada reciever. Tetapi jam atom
ini amat mahal bila dipergunakan untuk keperluan sehari-hari, bernilai sekitar
US $ 50,000 - US $ 100,000
Untuk menyiasati hal ini, jam atom
hanya dipasang pada satelit saja. Di reciever dipasang jam quartz biasa yang setiap saat
di-set secara otomatis. Reciever itu “melihat sinyal-simyal yang datang dari empat satelit atau lebih dan membaca ketidak
tepatan jam quartznya dengan memperhatikan sinyal-sinyal ini. Dengan kata lain
hanya akan ada satu “saat sekarang” (current time”) yang dapat dipergunakan
Nilai waktu yang benar ini akan meluruskan (allign) nilai waktu dari jam
quartz. Nilai ini adalah nilai waktu yang dipancarkan oleh jam
atom di satelit-satelit. Dengan menyetel diri ini nilai waktu di jam quartz
reciever akan sama dengan nilai waktu di jam atom satelit-satelit.
Dengan mengukur jarak dari reciever
ke satelit-satelit, anda dapat menggambarkan empat buah bola yang akan
mempunyai satu titik potong. Tiga bola akan saling berpotongan walau
nilai-nilai jarak anda kurang tepat. Tetapi empat buah bola tidak akan
berpotongan pada satu titik kalau pengukuran anda tidak benar. Karena reciever
mengukur jarak dengan menggunakan jam dirinya sendiri (yang mungkin tidak
tepat), semua pengukuran akan punya ketidak tepatan yang proporsional.
Reciever itu akan dengan mudah
melakukan penyesuaian yang diperlukan yang akan membuat keempat bola itu
berpotongan pada satu titik. Berdasarkan hal ini, reciever akan menyetel jamnya
sehingga sinkron dengan jam atom kepunyaan satelit. Reciever akan secara kontinu
melakukan hal ini dimanapun ia berada, yang berarti jam reciever ini akan
menjadi se-akurat jam atom satelit yang mahal itu.
Supaya informasi tentang jarak ini
selalu dapat dipergunakan, reciever harus tahu dimana posisi satelit yang
sebenarnya. Hal ini tidaklah terlalu sulit, karena satelit-satelit itu berada
pada suatu ketinggian dan orbit yang dapat diprediksi. Reciever tinggal
menyimpan jadual (almanac), yang memberinya informasi dimana satelit-satelit
tersebut berada pada satu waktu tertentu. Gaya tarik antara bulan dan matahari
memang membuat posisi orbit bisa agak berubah, tetpi Departemen Pertahanan
Amerika secara kontinu akan memberi tahu setiap penyesuaian posisi itu ke semua
reciever, sebagai bagian dari sinyal dari satelit (yang dipancarkan ke
reciever).
Dalam sektion berikut kita akan
melihat bagaimana kesalahan-kesalahan itu dapat terjadi dan melihat bagaimana
sistem GPS mengkoreksinya.
GPS Differensial
Kita sudah mempelajari bagaimana
reciever menghitung posisinya di bumi berdasarkan pada informasi-informasi yang
diterima dari empat satelit. Walau sistem ini sudah bekerja sangat baik, toh
tetap ada ketidak akuratan. Salah satu penyebabnya adalah bahwa kita
mengasumsikan gelombang radio berjalan di atmosfir seperti gelombang cahaya.
Dalam kenyataanya atmosfir bumi agak melambatkan kecepatan gelombang
elektromagnetik, khusunya di lapisan ionosfir dan trophosfir. Delay time yang terjadi,
tergantung pada posisi dimana kita berada. Ini berarti, sebenarnya sulit
menghitung secara tepat jarak satelit ke reciever. Juga akan ada masalah ketika
gelombang radio memantul pada bangunan pencakar langit, karena hal ini akan
memberi kesan bahwa seolah-olah satelit itu berada dalam jarak yang lebih jauh.
Yang paling sering terjadi adalah bahwa satelit mengirim data posisi ketinggian
dan orbitnya secara tidak tepat.
Sistem Differential GPS (DGPS)_akan
membantu mengkoreksi kesalahan-kesalahan ini. Ide dasarnya adalah mengukur
ketidak akuratan stasioner dari stasiun reciever terhadap lokasi yang dikenal
atau diketahui secara pasti. Karena hardware reciever si stasiun itu telah tahu
posisi dirinya sendiri, ia akan dengan mudah menghitung ketidak akuratan
reciever itu. Kemudian stasiun itu memancarkan sinyal radio ke semua stasiun
yang dilengkapi dengan DGPS reciever di daerah itu, untuk memberi sinyal
informasi koreksi untuk daerah tersebut. Secara umum dengan adanya akses
informasi koreksi ini, akan membuat DGPS reciever menjadi lebih akurat daripada
reciever biasa.
Fungsi yang paling esensial dari
reciever GPS adalah menyadap transmisi sinyal dari (paling tidak) empat buah satelit
dan mengkombinasikan informasi dari transmisi sinyal-sinyal ini dengan
informasi dari ”electronoc almanac” dan semuanya ini dengan maksud untuk
mendapatkan posisi dari reciever ini di bumi.
Begitu reciever membuat perhitungan,
ia dapat memberi tahu kita letak lintang, bujur dan ketinggian posisi reciever
tersebut saat ini. Untuk lebih memudahkan bagi kita dalam hal navigasi,
kebanyakan reciever memasukkan data mentah ini ke file peta yang telah ada di
memory.
Kita dapat menggunakan peta yang
telah diinstall di memory reciever, menghubungkan reciever ke komputer yang
dapat memuat peta yang lebih detail dalam memorinya, atau lebih mudahnya
membeli peta daerah kita yang detail dan menggunakan pembacaan bujur dan
lintang reciever untuk menentukan posisi kita. Beberapa reciever memuat
fasilitas dimana kita dapat down load peta detail ke dalam memory atau
menyediakan peta detail dalam plug in cartridgenya.
Reciever GPS yang standard tidak hanya
membuat kita tahu posisi kita dalam peta, tetapi juga membuat kita tahu arah
pergerakan kita dalam peta itu. Bila reciever itu kita biarkan terus dalam
keadaan ”on”, reciever itu akan terus menerus mengadakan komunikasi dengan
satelit-satelit dan kita dapat melihat perubahan posisi lokasi kita. Dengan
informasi ini dan dengan built in clocknya, reciever dapat memberi kita
beberapa informasi berharga sebagai berikut.
- Seberapa jauh kita sudah berjalan (odometer)
- Berapa lama kita berjalan
- Kecepatan kita pada saat ini.
- Kecepatan rata-rata kita.
- Peta perjalanan kita.
- Perkiraan waktu tiba di tujuan kalau kita mempertahankan kecepatan kita saat ini.
No comments:
Post a Comment